خوب…
بعضی از شما شاید پیش خودتون بگید اصلا هوش مصنوعی به چه دردی می خوره!
شاید توضیحش یک مقدار سخت باشه. تو این پست بجای اینکه توضیح بدم باهاش چه کار هایی می شه کرد فقط دو تا قطعه ی تصویری کوتاه که یکم قدرت هوش مصنوعی رو نشون میده میگذارم.
روبات ۴ پا
توی این قطعه یک روبات ۴ پا رو می بینید. توی ربات های ۴ پا و ۲ پا حفظ تعادل و تولید الگوی حرکت بسیار سخته. شاید در ابتدا زیاد ملموس نباشه.
برای همین مثال می زنم:
توی بازار عروسک های بسیار زیادی وجود داره. به عنوان مثال فرض کنید یک عروسک اسب گرفتید. حالا سعی کنید اون رو روی ۴ تا پاش ایستاده نگه دارید. بعد می بینید با یک ضربه ی کوچک عروسک می افته.
حالا فرض کنید بجای یک عروسک اسب یک عروسک دو پا مثل باربی می گرفتید. حالا بعد از کلی تلاش برای ایستاده نگه داشتن عروسک می بینید با یک تکان خیلی کوچک تعادل عروسک بهم می خوره!
خوب این ها در مقیاس کوچیک بودند! توی مقیاس های بزرگ تر حفظ تعادل بسیار سخت تره!
علاوه بر اون تولید الگوی حرکتی هم سخته. یک روبات تعدادی موتور داره! برای راه رفتن باید دقیقا بدونیم در چه زمانی هر کدام از موتور ها چه سرعت زاویه ای داشته باشند. شاید هنوز به سختی و پیچیدگی موضوع پی نبرده باشید! اگر بخواهیم یک آدم رو ساده سازی کنیم حدود ۲۰ درجه ی آزادی داره. یعنی ۲۰ موتور. حالا برای راه رفتن ما باید تعیین کنیم در هر لحظه هر کدوم از این موتور ها چه سرعت زاویه ای داشته باشند. این ساده ترین حالت هست که زمین صاف باشه. اگر کمی زمین شیب داشته باشه تمام اون سرعت ها عوض می شوند! یا مثلا اگر جنس زمین و اصطکاکش فرق کنه یا یه نیروی خارجی به هر نقطه از بدنه ی ربات وارد بشه! ما نمی تونیم همه ی این حالت ها رو دونه دونه محاسبه کنیم! اینجاست که هوش مصنوعی به کمک ما می آید!
همونطوری که یک بچه ی تازه به دنیا رسیده کم کم راه رفتن رو یاد می گیره کامپیوتر هم میتونه همین کار رو بکنه که در پست های بعدی در این رابطه و راه های مختلف تولید الگو های راه رفتن بیشتر توضیح میدم.
در حال حاضر مسابقاتی به نام Soccer3D چندین بار در سال بصورت اپن و یک بار بصورت جهانی برگزار میشه که موضوع اون دقیقا همین مسئله ، یعنی راه رفتن ربات های دو پا هست که در این مورد هم در پست های آینده بیشتر توضیح میدم.
فعلا برای مشاهده ی قدرت هوش مصنوعی و علاقه مند تر شدن به اون قطعه ی تصویری زیر رو ببینید!
RHex
این موجود هم به نظرم جالب اومد. توی مسابقات ربوکاپ آتلانتا هم حضور داشت و خیلی ها رو به خودش جذب کرد و هزینه ی خیلی زیادی هم روش شده اما به نظر نتیجه ی خیلی خوبی هم داشته!
توی این روبات برای کم کردن خطای مسیری که میره و تنظیم پره هاش برای حفظ تعادل از هوش مصنوعی استفاده شده.
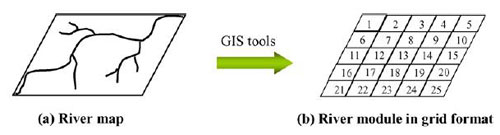
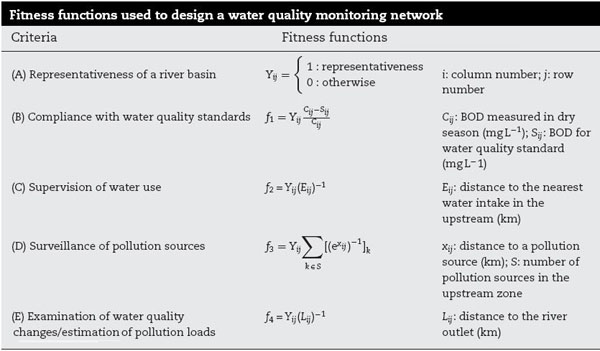
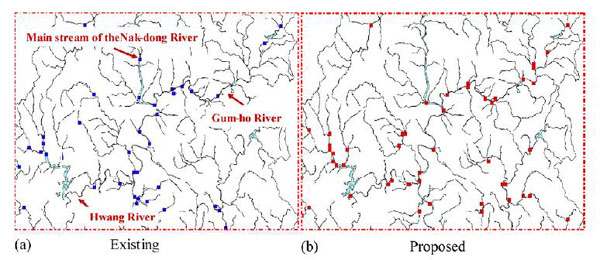
 ببخشید! شما گفتید که کل نقشه را جدول بندی می کنیم! که شامل رودخانه و خشکی می شود. اما اینطوری که من متوجه شدم ایستگاه ها حتما باید در کنار رودخانه باشند پس به نظر من درست این بود که فقط قسمت هایی که رودخانه در آن قرار دارد را شماره دهی کنیم!
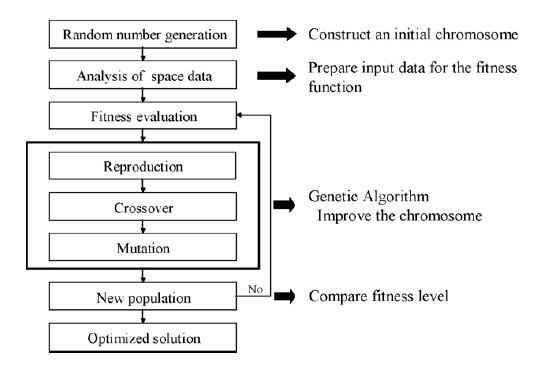
ببخشید! شما گفتید که کل نقشه را جدول بندی می کنیم! که شامل رودخانه و خشکی می شود. اما اینطوری که من متوجه شدم ایستگاه ها حتما باید در کنار رودخانه باشند پس به نظر من درست این بود که فقط قسمت هایی که رودخانه در آن قرار دارد را شماره دهی کنیم! ” نکته ی خیلی خوبی را اشاره کردید. یکی از راه ها برای حل این مشکل راهی بود که شما به آن اشاره کردید که کمی سخت است. در این مقاله به جای این کار در قسمت fitness دهی به خانه هایی که رودخانه در آنها نیست ضریب صفر داده می شود و در نتیجه به خاطر سلامتی صفر خود به خود حذف خواهند شد! “
” نکته ی خیلی خوبی را اشاره کردید. یکی از راه ها برای حل این مشکل راهی بود که شما به آن اشاره کردید که کمی سخت است. در این مقاله به جای این کار در قسمت fitness دهی به خانه هایی که رودخانه در آنها نیست ضریب صفر داده می شود و در نتیجه به خاطر سلامتی صفر خود به خود حذف خواهند شد! “